Bionic Robot
Inspection robotics is attracting much attention on
overhead power transmission lines to replace manual inspection
tour. In this paper, based on a benchmark of underactuated
Acrobot, we mainly focus on movements and control of a
two-link bionic-robot for online inspection by adding grippers
at the end of connecting links.
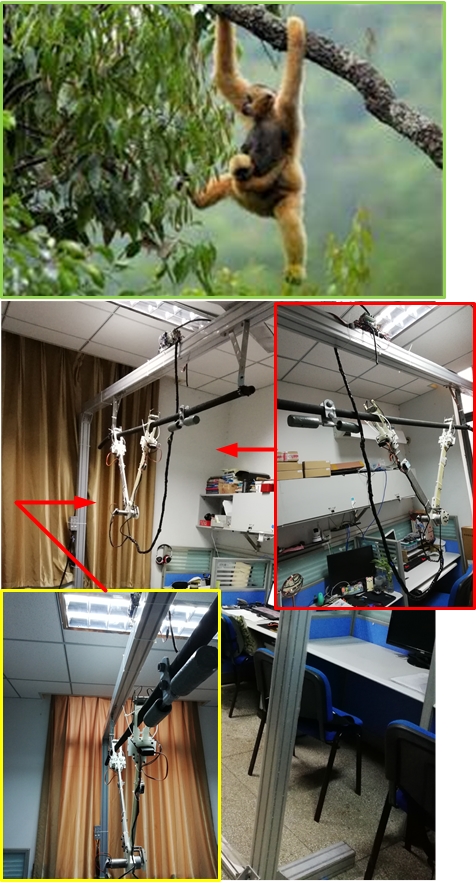
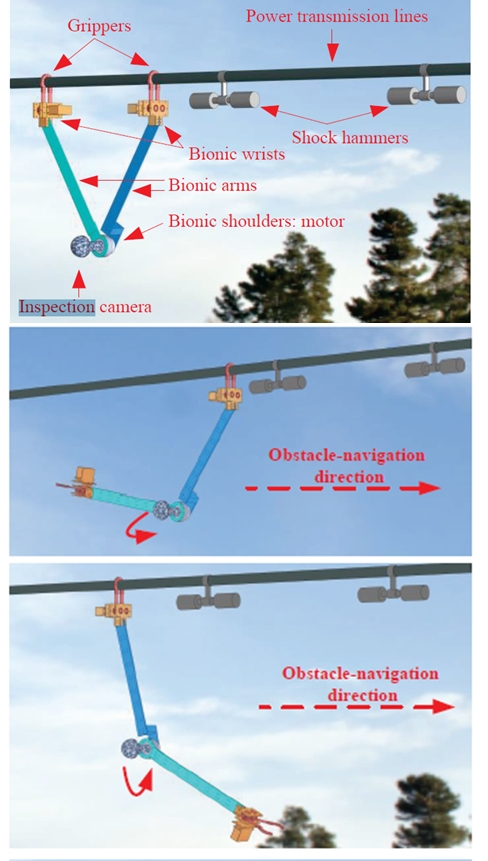 Figure 1. A two-link brachiating bio-robot system
Figure 1. A two-link brachiating bio-robot system
Chuande Liu
Lecturer
My current research interests focus on sensory-based manipulation, robotic motion planning, AI-augmented visual servoing and under-actuated robot systems.