Biography
I am Chuande Liu, a Lecturer at School of Artificial Intelligence, Nanjing University of Information Science and Technology. My research interests are directed toward the interdisciplinary study of Data Science, Robotics and Electrical Engineering, including Unmanned Aerial Vehicle Dock, Robotic Dexterous Manipulation, and Artificial Intelligence applied in Ship-borne Drones and Special Operations.
Welcome any students who have strong interests in
- UAV Landing Aid Stabilization
- Data-driven Decision Making
- AI-augmented Visual Servoing
- Sensory-based Manipulation
-
PhD in Electrical Engineering, Mar. 2022
-
CSC Visiting scholar in Robotics, Sep. 2020
-
MEng in Electrical Engineering, Dec. 2016
Posts




Selected Research Projects
Dexterous Manipulation
To develop and apply one-arm mobile manipulator to open power-cabinet doors and task work inside

Meka-Robot Manipulation
Deep learning is a powerful non-linear mapping tool which can express very complex non-linear relationships. I focus on deep learning on Meka-Robot for door-opening.
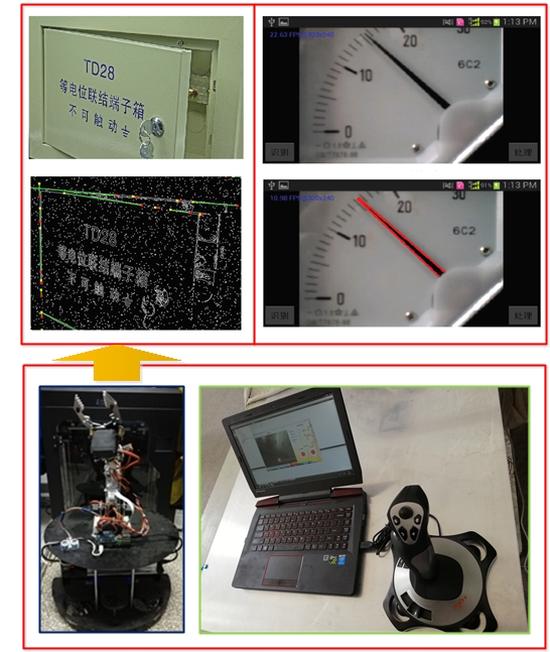
Edge Detection
To deal with the power cabinet door-opening state recognition based on edge feature extraction
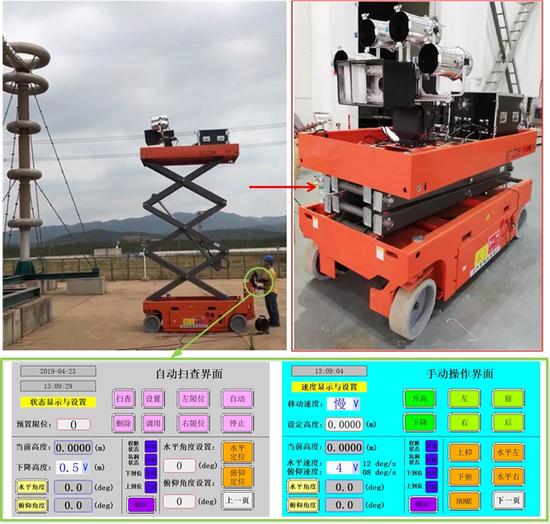
High-voltage Insulator Defect Detection
Developed a mobile vehicle that can automatically detect the defect of high-voltage insulators in live-line working

Bionic Robot
Developed a bionic robot to replace manual tour inspection for power transmission lines
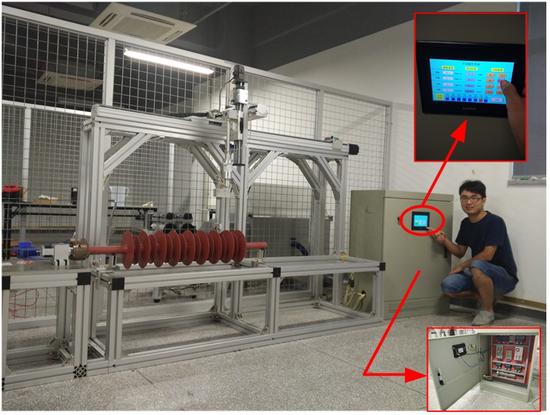
Power Insulator Defect Detection
Developed a device that can automatically detect the defect and damage in different types of power insulators
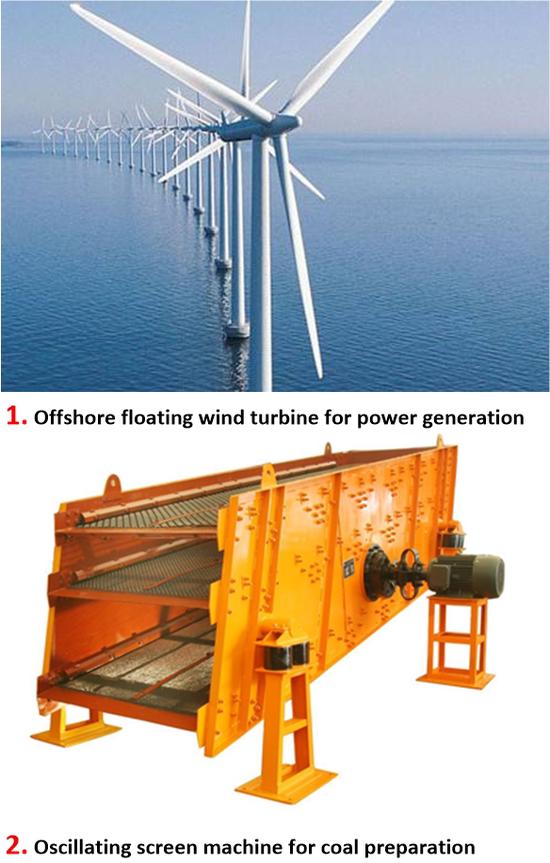
Under-actuated Machine Control
To apply under-actuated technology to stabilize the oscillation of offshore wind turbine and slove control problems in oscillating screen machine
